Авиатехника,
Железнодорожная техника,
Автотехника,
Водная техника,
Космическая техника,
Военная техника,
Сельскохозяйственная
техника, Бытовая техника,
Радиоэлектроника,
Электрика,
Энергетика,
Механика,
Мебель своими руками,
Строительство,
Ремонт,
Приусадебное хозяйство,
Инструменты,
Полезные советы,
Конструктор-конструктору,
Технические статьи,
Исторические хроники,
Неопознанное,
Из области фантастики,
Полезные ссылки,
Обмен ссылками,
Размещение
статей, рекламы

Энциклопедия юного техника

Дата создания
сайта:
24/02/2013
Машины которые ходят
Люди давно уже стали сознавать, что ноги - уникальное средство
передвижения. Конечно, им не под силу конкурировать с колесом на гладкой
дороге, но зато они прекрасно могут обходиться без дорог вообще. Ноги
позволяют животным и человеку передвигаться по пескам пустыни и по
болотным кочкам, среди нагромождения скал и по снегу. И, наверное, не
случайно, еще в 1813 г. англичанин Брайтон, прекрасно знавший
возможности колеса, приделал к своему паровозу "ноги". Шипя и
поскрипывая, невиданная машина медленно, подобно неторопливому пешеходу,
зашагала по дороге, отталкиваясь от нее двумя железными рычагами.
Развитие паровозостроения, как вы знаете, пошло другим путем. Аашину
Брайтона историки техники отнесли к курьезам, а самого изобретателя
зачислили в неудачники. Но столетия спустя отношение ученых к Брайтону
"смягчилось", и сегодня уже многие конструкторы разных стран мира
склонны рассматривать его творение как прообраз шагающих вездеходов для
Земли и космоса.
Все чаще в попытке разрешить
"вездеходную проблему" конструкторы исследуют механизмы "шагания" живой
природы. За миллионы лет эволюции природа создала множество оригинальных
типов движения, приспосабливая живые существа к различным видам
перемещения по земле - ползанию, бегу, прыжкам, ходьбе. Многие животные
по скорости не уступают современному колесному транспорту, а их
"проходимость" вообще вне конкуренции. Гепард даже на пересеченной
местности развивает скорость до 110 км/ч. Леопард, пантера легко
преодолевают двухметровые барьеры, а горные козлы - пропасти, ширина
которых во много раз превышает длину тела этих животных. Росомаха легко
бегает по глубокому рыхлому снегу, копыта оленей приспособлены для
ходьбы по болотам, а верблюдов - по пескам пустыни...
Пытаясь создать универсальные механические "ноги", ученые изучают
структуру органов движения, характер приложения мышечных усилий, которые
вызывают те или иные движения в суставах, кинематику сочленений,
распределение массы тела по его звеньям, закономерности движения этих
звеньев и тела в целом. Исследуют также характер, направление и величину
действующих сил и многое-многое другое.
Если раньше создание шагающих машин во многом тормозилось сложностью
электронных управляющих систем, то последние достижения в области
кибернетики дают основание считать, что в самом ближайшем будущем
шагающие машины наконец-то выйдут из стадии опытов.
Вам, наверное, интересно будет узнать, что в университете штата Огайо
(США) создан опытный образец шагающего вездехода ASV. Его испытания и
отладка начались в 1985 г. Грузоподъемность вездехода, имеющего длину
около 5 м и движущегося на шести "ногах-опорах", составляет около 200
кг. Двигатель мощностью 90 л. с. позволяет в условиях полного бездорожья
развивать скорость 5...10 км/час. Система управления включает 15
микрокомпьютеров и оптический локатор (лазерную сканирующую систему).
Пять компьютеров анализируют сигналы локаторов, а остальные координируют
движение "ног" по командам оператора-водителя, определяющего общее
направление движения. Машина способна "ходить" по болотам, горам,
пустыням, глубокому снежному покрову и льду. Она может преодолевать
препятствия высотой до 1,2 м, перебираться через канавы и водные
преграды шириной п()чти 3 м, при этом корпус вездехода не отклоняется от
горизонтального положения. Трудно сказать, начнется ли в ближайшем
будущем промышленное производство таких машин^ поскольку стоимость их
пока непомерно высока. Поэтому американцы в шутку прозвали вездеходы ASV
"кавалерией XXI века".
Кто знает, может быть, именно за шагающими машинами будущее в освоении
неисследованных земель и планет нашей Солнечной системы. Представьте
себе картину: безбрежное море красноватого песка, источенные ветровой
эрозией скалы причудливых очертаний, фиолетовое небо с маленьким
пятнышком негрею-щего Солнца. Конечно, это Марс. Но что это? Среди
песков и каменистых россыпей что-то вдруг сдвинулось с места,
причудливой формы аппарат приподнялся на мощных телескопических опорах,
словно обозревая местность, и опять опустился на грунт, немного впереди
того места, где только что находился. Неужели марсиане? Нет, это земной
вездеход, причем не гусеничный или колесный и даже не шарокат, а
шагающая машина, которая передвигается посредством двух опорных
поверхностей и опирается на грунт всем корпусом в то время, ка1?_они
подняты. Оригинально, не /правда ли?!
Модель этого типа - шаштояг изображенный на рисунке 17,- самая простая
из машин такого рода. По подобной схеме иногда строят шагающие
экскаваторы, только вместо ног у них предпочитают ставить мощные лыжи.
Основа конструкции - два одинаковых, синхронно вращающихся коленчатых
вала, к кривошипам которых крепятся ноги. Кривошипы дают им круговое
поступательное движение, и машина шагает вперед или назад, в зависимости
от направления вращения. Вездеход может поворачиваться на месте на любой
угол в тот момент, когда ноги находятся в верхнем положении. Для этого
опоры корпуса крепятся к поворотной платформе. Шагоходу в начале
перемещения корпуса приходится поднимать на кривошипах весь свой вес,
поэтому модель этого типа не следует перегружать батареями: гораздо
удобнее снабдить ее дистанционным управлением по проводам. Редуктор,
вращающий кривошипы, должен иметь большое передаточное отношение, иначе
двигатель не справится со своей задачей.
На схеме показан дополнительный шатун 4. Он нужен для того, чтобы
ведомый вал повторял направления вращения ведущего при проходе через
мертвые точки.
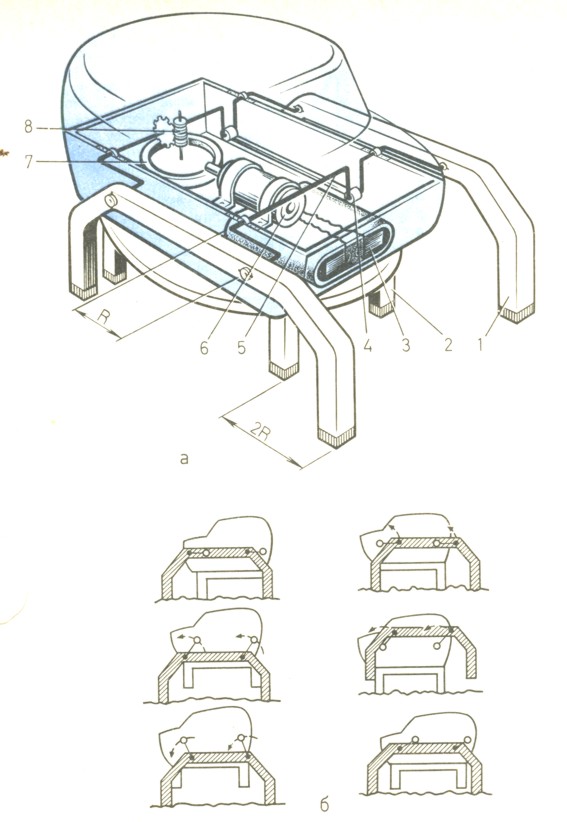
Рис. 17. Простейшая шагающая машина: а- устройство (1-арка для шагания: 2 - опорная платформа; 3 - батарея питания; 4 - шатун; 5 - кривошип; 6 - мотор; 7 - фрикционная передача; 8 - редуктор); б - схема движения.
Иначе его кривошипы станут совершать лишь колебательные движения, и машина вместо того, чтобы перемещаться, будет лишь "взбрыкивать", опираясь на передние ноги. Можно, конечно, вместо дополнительного шатуна применить и другие способы синхронизации кривошипов, например зубчатые колеса. Но есть и более простой способ обойтись без шатуна - немного рассогласовать движения ног. Достаточно развернуть на 20...30° левые кривошипы относительно правых, и одна из ног будет вести вал, когда другая проходит мертвую точку. Правда, машина при "ходьбе" начнет слегка переваливаться с боку на бок, и в некоторых фазах движения ее ноги будут скользить по земле, но зато конструкция упростится. Ноги и опоры корпуса нужно расположить так, чтобы они ступали рядом. Это повысит проходимость.
Читать далее про шагоходы...
p.s. При копировании материалов и фотографий активная ссылка на сайт обязательна.
Авиатехника,
Железнодорожная техника,
Автотехника,
Водная техника,
Космическая техника,
Военная техника,
Сельскохозяйственная
техника, Бытовая техника,
Радиоэлектроника,
Электрика,
Энергетика,
Механика,
Мебель своими руками,
Строительство,
Ремонт,
Приусадебное хозяйство,
Инструменты,
Полезные советы,
Конструктор-конструктору,
Технические статьи,
Исторические хроники,
Неопознанное,
Из области фантастики,
Полезные ссылки,
Обмен ссылками,
Размещение
статей, рекламы
Смотрите также интересные ссылки:
Автохимия для авто Мойка вагонов, разработки для железнодорожного транспорта и
метрополитена
Бесконтактная мойка авто и транспорта Средства
для Ультразвука и ультразвуковых ванн
Дезинфицирующие средства